
The ExynPak is a portable LiDAR based SLAM (Simultaneous Localization and Mapping) solution that captures highly dense and accurate point clouds in just minutes. In efforts to optimize scan quality and to further standardize best practices using the Pak system, we wanted to share six critical tips to help you capture the best ExynPak data.
 ExynPak handheld system with high resolution cameras for colorized captures.
ExynPak handheld system with high resolution cameras for colorized captures.
(1) Plan your path. Think of what your optimal scan would look like and how you can curate the best environment to capture it. Plan your scan route ahead of time by removing obstacles that might disrupt your flow, opening doors to rooms you may want to enter, and picking the right time of day with minimal traffic in your scan area.
(2) Choose your configuration. For some large outdoor areas, it may make more sense to use the vehicle mount configuration and perform a driven capture as opposed to a hand carry capture. For hands-free operation, the BackPak may be optimal. The vehicle mount and the BackPak can be seen in the images below.

ExynPak vehicle mount configuration |

BackPak configuration |
(3) Set yourself up for success. Ensure the ExynPak is not moved or subject to vibration during initialization and begin scanning in a location that is easily identifiable. To maximize point cloud density and clarity, minimize sudden or abrupt motions (this is where planning your path ahead of time will be paramount).
(4) Prepare for handling transitioning environments. If you are transitioning into new spaces via a hallway or some type corridor, position the Pak such that you can see part of the area you have already scanned, and slowly back into your frontier (the area you are looking to scan next).
(5) Achieve loop closure. Loop closure plays an important role in reducing error and subsequently increasing map quality. To achieve loop closure, try returning to previously mapped areas throughout the course of a scan.
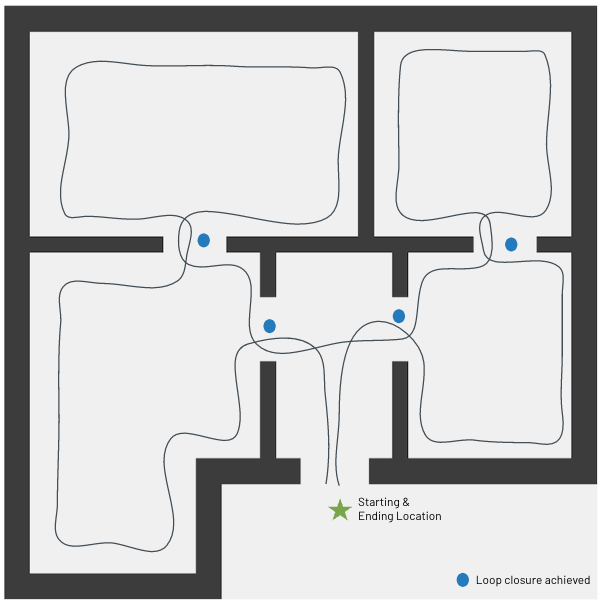 This image illustrates intermediate loop closures as well as a final loop closure achieved upon returning to the start location at the end of the scan.
This image illustrates intermediate loop closures as well as a final loop closure achieved upon returning to the start location at the end of the scan.
(6) Features are salient. Generally, the best scans are generated from environments that have a lot of features (geometric structures that assist in mapping - points, lines, polygons, etc.). The image below is a great example of a feature-rich area. Note the geometries present in the environment - these enhance the performance of SLAM algorithms. A feature-degraded environment such as a wide open field or a smooth tunnel would present challenges for the system.
 Feature-rich environment sample
Feature-rich environment sample
For more information using the ExynPak, please view the video below linked here:
What can I do with my Pak data?
Colorize it. Equipped with two high resolution cameras, the ExynPak can create colorized scans of areas by assigning RGB values to points. Colorized point clouds assist in revealing details in infrastructure that were previously inaccessible to the human eye or standard LiDAR point clouds (uncolorized). These clouds present more photorealistic representations of the environment.
Some sample colorized point clouds can be seen below.

Connex boxes, training environment |

Skate park |
Once data has been collected, data can be exported into .ply, .xyz, and .las formats. The data can then be uploaded into various forms of modeling software for further analysis to enhance overall efficiency in business operations.
For information on the ExynPak product and system specifications see here.
For more detailed information on 3D SLAM best practices, please download our ExynPak Guide (pdf) below.
