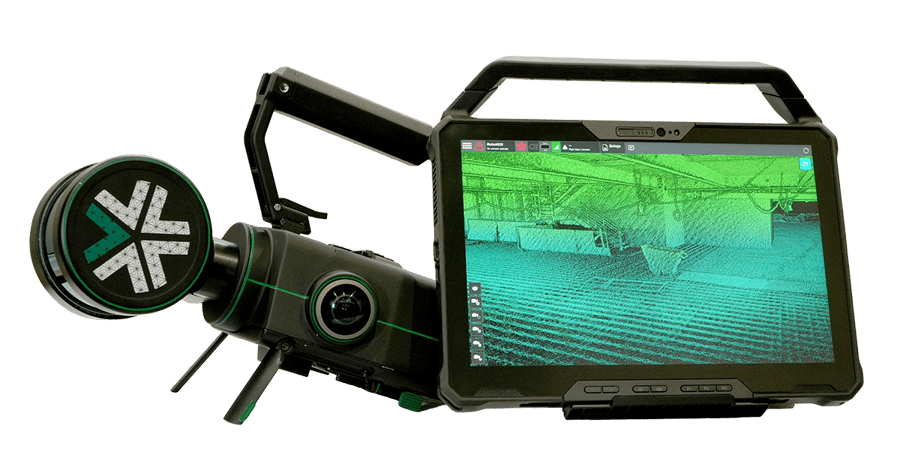



Nexys can be quickly and easily switched between a variety of configurations, giving you the flexibility and cost efficiency to use one device in any mapping environment.

Capture survey grade data - fast - with real time colorization and visualization in the field to ensure the scan area is correct and complete before you leave the site.
Explore SLAM mapping

Smarter and more powerful than anything in the market, our proprietary autonomy algorithms -- coupled with our SLAM-based LiDAR scanning technology -- deliver survey-grade results faster, safer, and more efficient than ever before without a pilot in the loop.
Explore Autonomy Packages




A fully modular autonomous drone that collects accurate, real-time 3D colorized point clouds in complex, dangerous, or inhospitable environments.
Explore ExynAero DJ34