Overview
Photospheres (also known as 360° panoramic images or equirectangular projections) provide an immersive view of an environment, allowing teams to visualize spatial context beyond LiDAR or point cloud data.
They are especially useful for:
-
Visual inspection of areas where SLAM or LiDAR data may not fully capture texture or detail.
-
Site documentation and progress tracking.
-
Integration into visualization platforms (e.g., Cintoo, Prevu3D, Bentley iTwin, or internal viewers).
Enabling Photospheres
-
Open the Exyn Admin Console
Navigate to the Devices tab and select the robot you want to configure.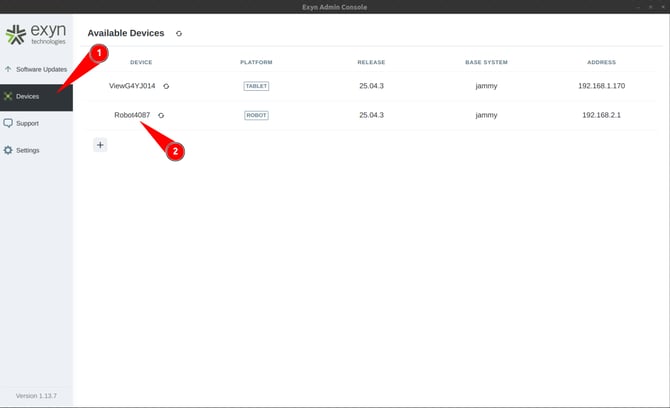
-
Access Device Settings
In the robot’s profile, click Settings to view configurable system parameters.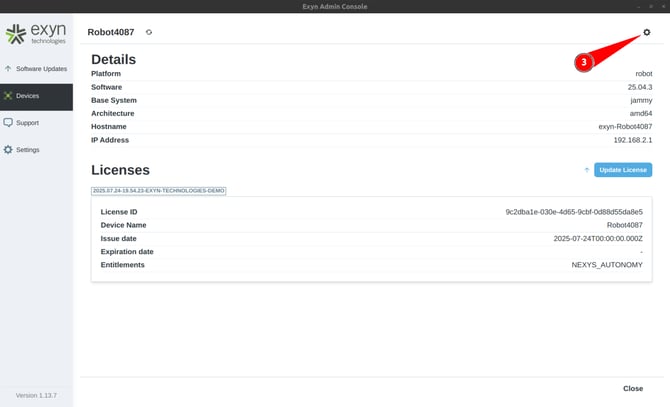
-
Open Calibration Settings
Scroll to Calibration, then select Edit Calibration Settings to modify the data-capture configuration.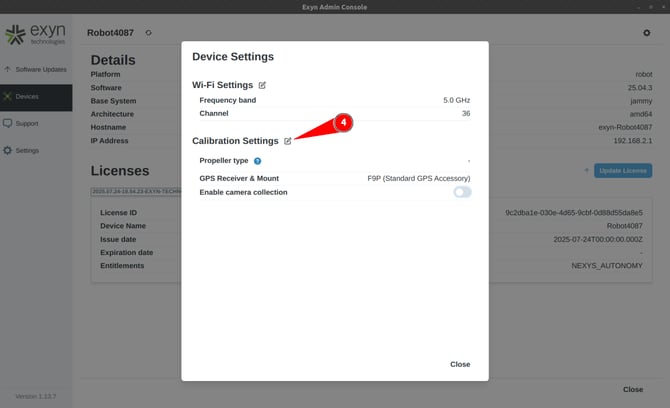
-
Enable Photo Capture
Toggle Camera Collection to the On position to activate photo data collection for supported workflows.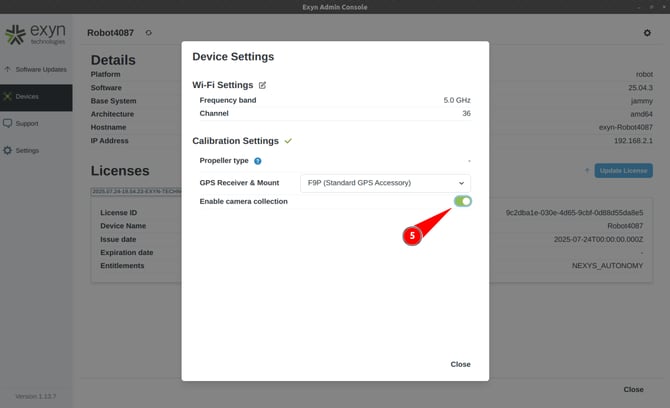
Capturing Photospheres
Photospheres can be captured using either the Nexys system equipped with two integrated visual sensors or a 360° camera.
Using Nexys System Imagery
-
Capture still imagery during a scan or as a standalone visual dataset.
-
After the mission, export the captured images through Exynview for independent viewing or import into a preferred platform.
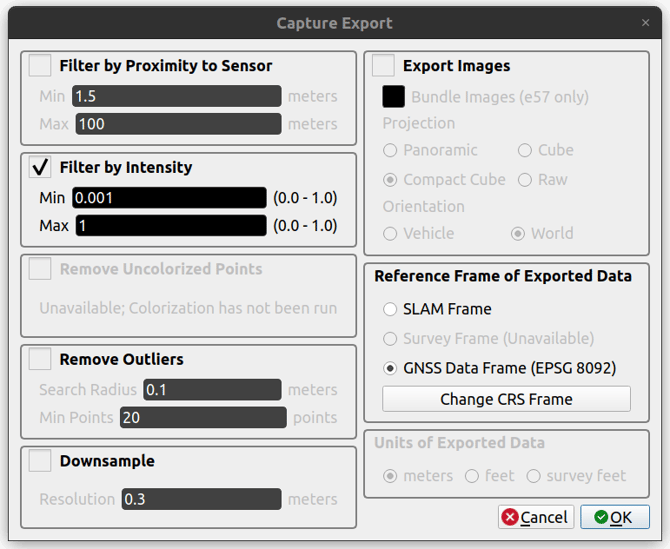
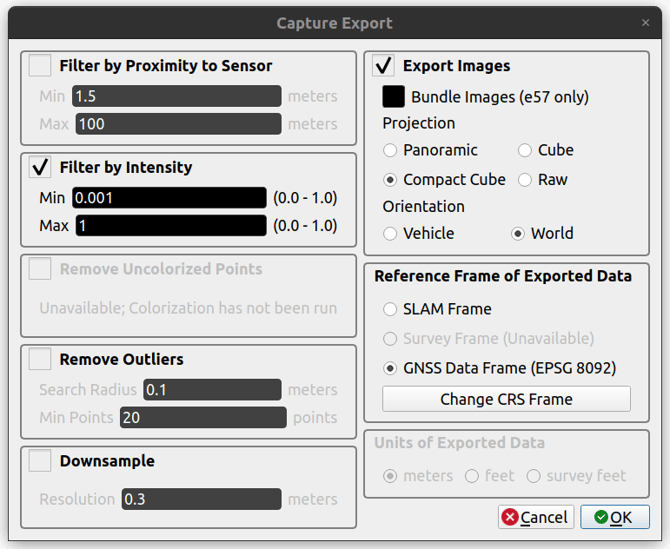
Exporting Photospheres
Once images are captured, export them for ingestion or sharing:
- Select Preferred Export Settings
|
No Images Exported |
Images Exported to Dedicated Folder |

Bundle Images (e57 only) |
Click '✅ OK' to Export with Images |